速记版
抖杆在前抖振在后,先抖杆了,别慌
若是离地或复飞时候,先瞄一眼三块速度表速度都一样不,一样说明不太可能是空速不可靠,再看速度大于V2不,就是MCP板上你设的V2,大于的话,那就保持当前速度继续爬升,油门和姿态是可靠的,这俩一个全推力,一个姿态10~15度,不太可能是失速,可能是其他原因触发了抖杆指示。低高度的失速不仅要注意减小迎角还要注意防止触地趋势。
| PF | PM |
| 开始改出: 握紧,双脱,柔和减小姿态 | 监控高度,空速,核实动作报遗漏,报撞地趋势 |
| 继续改出: 横滚,加点油门,收减速板,离地要是襟翼光洁,放襟翼1 | 同上,加个按指令放机翼1 |
| 完成改出: 看空速加油门,姿态10~15度,回到航径,接通自动驾驶和油门 | 同上 |
官方版
所有接近失速的改出应按照失速执行
一旦出现失速指示(抖振或抖杆),立即执行下列程序
注:改出过程中不要使用飞行指引指令。
| PF | PM |
| ·开始改出: ·握紧驾驶杆。 ·脱开自动驾驶和自动油门。 ·柔和使用机头下俯升降舵减小迎角,直至抖振和抖杆停止。可能需要机头下俯的安定面配平。* | ·监控高度和空速 ·核实所有动作都已完成,并报出任何遗漏的项目 ·报出任何撞地的趋势 |
| ·继续改出: ·如需,以最短方向横滚使机翼水平。** ·前推油门杆 ·收回减速板 ·不要改变起落架和襟翼形态,除非: ·离地过程中,如果襟翼收上,指令襟翼1. | ·监控高度和空速 ·核实所有动作都已完成,并报出任何遗漏的项目 ·报出任何撞地的趋势 ·根据指令设置襟翼1 |
| ·完成改出: ·检查空速并按需调整推力。 ·建立俯仰姿态 ·返回所需的飞行航径 ·按需重新接通自动驾驶和自动油门 | ·监控高度和空速 ·核实所有动作都已完成,并报出任何遗漏的项目 ·报出任何撞地的趋势 |
警告:*如果驾驶杆没有提供所需的反应,可能需要安定面配平。过度的使用俯仰配平可能会使情况恶化,或导致操纵失控或结构载荷过大。
警告:**过度使用俯仰配平或方向舵可能会使情况恶化,或会导致操纵失控或结构载荷过大。
FCTM的提示(理解后的大白话)
1.失速改出在任何阶段都可能发生,通过过去的征候和事故调查,发现及时改出才是重点,而且也把重点从损失高度改成了减小迎角,也就是说一是赶紧改别犹豫,二是别怕掉高度,减小迎角是第一位的。
2.识别失速除了抖杆和抖振,一般都是先抖杆再抖振,有时候也会同时发生。还有俯仰,横滚操纵困难,无法阻止下降率也是失速的表现,如果升降舵不好使,赶紧往下打配平。
3.737的发动机在机翼下面,你一加油门,机头就上仰,所以加油门要柔和,同时按住机头。
4.飞机带坡度,先把机头按下去再横滚,因为副翼可能已经失速了或接近失速,迎角减小,副翼操纵性能更好。
5.有时候起飞复飞,推力特别大,按机头搭配平也阻止不了抬头,那可能需要减小一点油门,甚至有些极端情况,飞机减小推力,按机头加打配平还是不能阻止机头高,那就加点坡度,如果横滚都不好使,那就柔和踩点舵帮助横滚到45~60度,人为进入复杂状态来改出失速。但是不要过量也不要过快,防止横滚失去操纵。
6.放襟翼说的是起飞离地先失速了,又不小心把襟翼收光了,那就赶紧放回到1,除此以外其他任何情况都不要改变形态,改变形态只会导致掉高度。
7.高高度失速,一般20000尺以上,用高度换速度,推力不太好使。
8.低高度,防止撞地趋势,有些系统故障会假抖杆,速度大于V2就抖杆比较少,除非空速不可靠,空速可靠,速度大于V2,继续爬升到加速高度再减小姿态。
9.襟翼的前缘装置内侧比外侧先失速,这样的好处是开始失速时飞机机头自然下俯。
10.减速板提高了失速抖杆的速度,但是实际失速速度没有变,就是说提前抖杆了,但是真正失速的速度没有变,那就是拉减速板那个最小速度会逻辑上移。
11.注意不要跟随指引,还有一个不跟指引的机动是GPWS机动飞行。
12.模拟机的三种失速练习
a.改平失速

注意回到目标速度,接通自动油门和自动驾驶,别超过目标高度,爬升10度够了,别进入异常姿态,不要跟指引。
b.三转弯失速
指令转弯时机是速度在琥珀色顶端,若没有安装速度带的飞机,则在襟翼5机动速度。
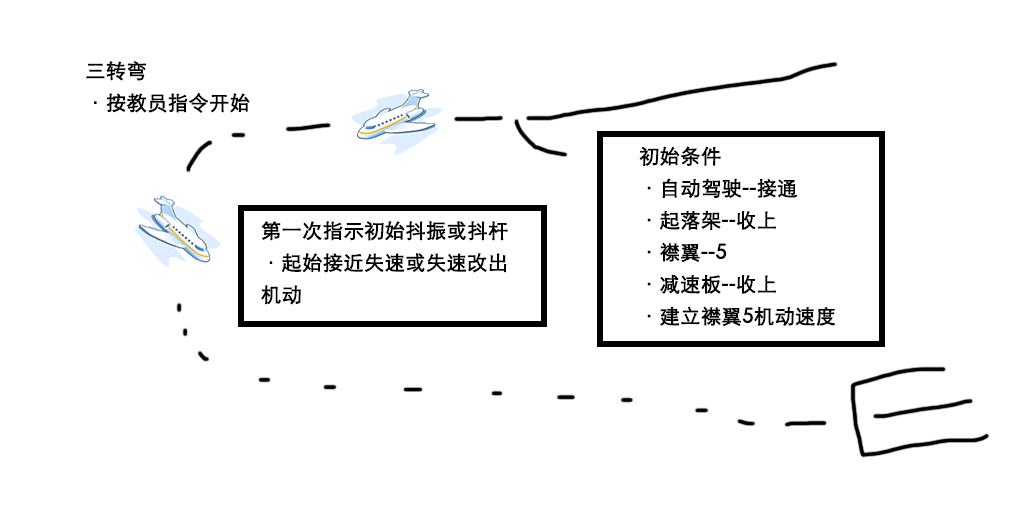
注意改平飞机,给个航向指令,速度回到了襟翼5速度,自动油门接通,自动驾驶接通。不要超过目标高度。爬升10度够了,不要跟指引,进入异常姿态。
c.ILS最后进近失速
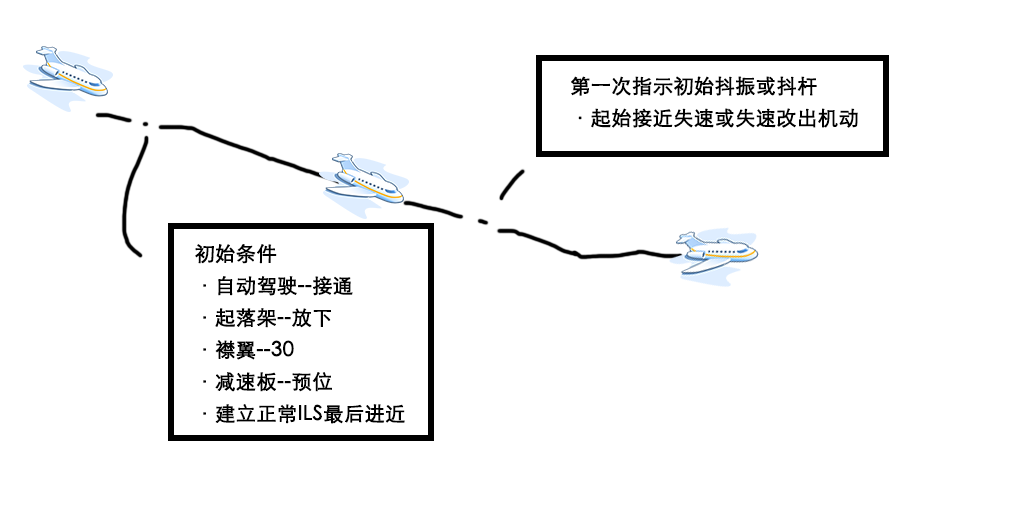
注意这个配平需要向前打很多
推力可以设置最大推力,速度到了VREF之后,喊话“复飞”,PF按TOGA,执行复飞程序。
 粤公网安备44030602006664号
粤公网安备44030602006664号